| 产品特性:摄像头 | 品牌:略 | 型号:T265 |
| 上市时间:略 | 货源类别:现货 | 类型:智能摄像头 |
| 焦距:略 | 有效距离:略 | 清晰度:略 |
| 操作方式:详情可见 | 使用环境:详情可见 | 产品尺寸:详情可见 |
| 产品重量:略KG | 加印LOGO:不可以 | 附加功能:其他 |
| 是否支持一件代发:支持 | 最快出货时间:4-7天 | 售后服务:全国联保 |
| 质保年限:1年 | 发票:提供发票 | 包装清单:略 |
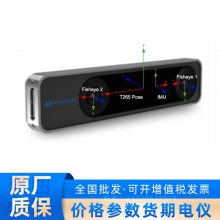
实感追踪摄像头T265采用了Movidius Myriad 2视觉处理单元(VPU),可直接在设备上处理追踪所需的数据。这使得T265成为一种尺寸小、功耗低的解决方案,可帮助***轻松利用现有的设计或自行构建需要丰富视觉智能的产品。
位置感知可以说是在3D世界中生存和导航所需的最基本和最重要的感觉之一。移动,觅食以及回巢的能力深深植根于所有动物的基因之中,所以机器人技术面临的挑战是:“我们如何以电子方式模仿,甚至增强这种先天能力?”在计算机科学领域,这项研究通常称为“即时定位与地图构建”或SLAM。它涵盖了对仪器和算法的研究,尝试解析代理(机器人或自动驾驶汽车)在3D空间中的位置和方向,同时创建和更新未知周遭环境的“心理”映射。有人会将其称为对环境的“内向外”追踪,将其与“内向外”的动捕(mo-cap)或通过周围固定摄像头阵列实现的对象追踪区别开来要。对于大多数应用而言,SLAM最重要的方面之一是能够完全追踪所有六个自由度,这意味着一个人自己的空间位置(X,Y,Z),以及角度方向(纵摇/Pitch、横摇/Roll和垂摇/Yaw)。
今天市场确实存在针对受限映射问题的成熟解决方案。例如,全球定位系统(GPS)和辅助导航现已十分普及,几乎每台移动设备都嵌入了接收器,从根本上消除了学习如何阅读和导航地图的需求。但GPS的精度目前限制在大约10米。另外,更新速率相当慢,大约是10Hz,并且只能支持户外,因为它们需要接收来自GPS卫星的电子三角测量信号,同时山脉和建筑物的反射会造成多径干扰。近年来,另一个真正取得了惊人发展的传感器是惯性测量单元,即IMU。它由陀螺仪和加速度计组成,通常包含微小的集成MEMS(微机电系统)组件,能够快速测量其自身方向和加速度的变化。这种组件现在已经融入至每台移动设备之中,而你可以单独购买,价格约为1美元。在价格,功率和尺寸频谱的其他范围内,激光雷达(LiDAR)在开发全自动驾驶汽车的竞赛中变得非常受欢迎。LiDAR通常由旋转/扫描激光束组成,它们采用短光脉冲或频率调制,以毫米级精度测量到周围对象的距离。
我们今天重点关注的技术称为视觉惯性里程计(VIO),它实际是最接近大多数动物感知世界方式的电子等效方案:将CMOS传感器充当感知周围环境的眼睛;IMU作为内耳来感知平衡和方向;以及一个充当大脑,将信息融合到瞬时位置和映射中的计算组件。VIO已成为近年来最有前景的SLAM技术之一,并且算法和变体正在不断发展和改进。例如,当今大多数增强现实/虚拟现实头显(包括微软HoloLens,Oculus Quest或Magic Leap One)和智能(苹果AR Kit和谷歌AR Core)都通过自家的VIO版本来***且低延迟地追踪设备的完整六自由度。另外,VIO现在开始在机器人技术中获得越来越广泛的采用。与现有的激光雷达解决方案相比,VIO系统体积更小,成本和功耗***,并且它们可以通过根据视觉特征来识别并重新定位其在大范围映射中的位置,从而提供了***的重新定位潜力。
在接下来的章节中,我们将进一步探讨VIO的工作原理,并将介绍旨在作为AR/VR头显,机器人和无人机等用例的完整交钥匙嵌入式SLAM传感器解决方案的英特尔实感摄像头T265和追踪模块T261。我们将解释关键的SLAM系统性能指标,并且将展示如何轻松通过Intel RealSense Viewer入门T265摄像头,并使用开源的Intel RealSense SDK实现程序接口。这份本白皮书旨在作为简要的介绍和综述,而深入的细节则交由其他技术文档。
学习视觉惯性测距法的方法是首先理解“视觉”方面。这个核心概念可以追溯到指南针和GPS之前的时代,亦即人类按照星星进行导航的日子,如图1A所示。通过识别特殊的星星,人们通常可以使用查找表来确定北面(即方向)并计算自己的纬度和经度(即位置)。
在计算机视觉中,我们努力以最快,***的方式完成相同的任务。我们首先拍摄周围环境的电子照片。它通常包含数百万个像素,所以我们使用“特征检测算法”将信息内容立即压缩到基本只剩下几百个命名点的程度。换句话说,现在图像替换为包含数个白点的黑色图片,而每个白点都有相同的标识,就如同在晚上看向天空一样。什么是“特征”呢?例如,特征可以是“图像的所有边角”。实际上,这是一个非常活跃的研究领域,特征检测算法比比皆是:SIFT,LIFT,Harris Corner,Shi-Tomasi corner,ORB,BLOB,SURF,KAZE,FAST等。一旦检测到特征,算法将为每个特征赋予“描述符”或“特征向量”,从而实现“命名”。我们对接收到的每个新图像帧重复这一过程,并使用特征追踪算法比较并追踪连续帧(或特定关键帧)中的特征。我们强调每个特征都映射到3D空间,不仅仅只是二维